 X
X Facebook
Facebook LinkedIn
LinkedIn Reddit
Reddit Bluesky
BlueskyA perspective on neuromorphic models of the corticospinal neuromuscular system to understand human movements
- Volume
- CitationLan N, Cui H, Zhang Z, Xie A, Patton J, et al. A perspective on neuromorphic models of the corticospinal neuromuscular system to understand human movements. Neuroelectronics 2026(1):0003, https://doi.org/10.55092/neuroelectronics20260003 .
- DOI10.55092/neuroelectronics20260003
- CopyrightCopyright2026 by the authors. Published by ELSP.
- Special Issue
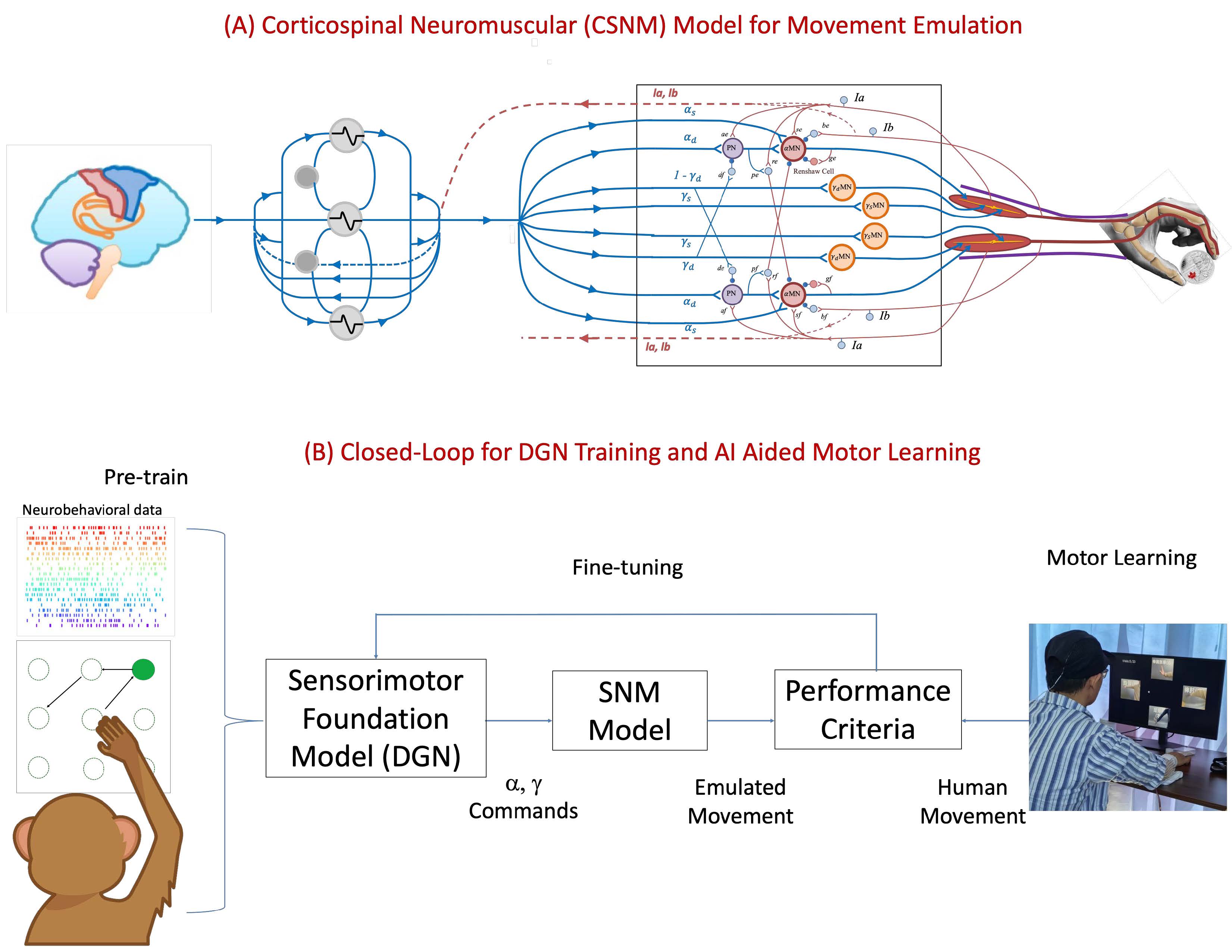
How does the brain learn to control the hand to accomplish a novel task remains a mystery. Motor learning requires iterative trials of the same motor task to train the neural network in the brain. This is done in humans through interaction between the brain and the spinal neuromuscular (SNM) system, the latter provides a foundation for human motor learning. Here, we present a perspective on a computational approach to understanding brain mechanism of motor learning, based on the premise that building a neuroelectronic model of the corticospinal neuromuscular (CSNM) system will allow biorealistic animation of human motor control. With such a model, various AI-based algorithms could be evaluated for acquiring motor control skills, and the learned motor behaviors can be compared to those of humans for verification. Animation on how AI develops motor ability may unveil likely mechanisms of human motor control. Such insights may also have important implications to rehabilitation of motor functions for people with neurological injuries. With this perspective in mind, we show supporting evidence that a neuromorphic model of the SNM system implemented using very large-scale integrated circuits with field programmable gate arrays (FPGA) is promising for biorealistic real-time simulation. We also propose a paradigm of α–γ supraspinal strategy for controlling a virtual hand finger with a pair of antagonistic muscle models. Recent advances in deep generative network (DGN) cortical models have demonstrated human-like ability to learn, predict and scale for a variety of classes of movements. Performance metrics for human-like movements are also elaborated as neurophysiological constraints for model-generated movements. We envision that the neuroelectric CSNM model coupled with AI-based learning can facilitate grasp of the natural ability of human movements.
neuromorphic models; corticospinal neuromuscular system; deep generative network; prosthetic hand; human movements
